Apresentação do curso/revisão: slides
Inclusão de vento nas equações do movimento: slides
Saídas: slides
Apresentação do curso: slides
Motivação (Porta-Hamiltonianos): slides
Breve tutorial de Python para usuários de MATLAB: link
Projeto do primeiro bimestre projeto1
Integradores numéricos em Python integradores.py
Apresentação do curso: slides
Modelo atmosférico: slides
Modelo aerodinâmico: slides
Planeio: slides
Cruzeiro: slides
Subida: slides
Decolagem: slides
Manobras e diagrama V-n: slides
Atividade prática 1 (planeio): pdf
Atividade prática 2 (cruzeiro): pdf
Atividade prática 3 (decolagem): pdf
Todo o material está no moodle do curso, clique aqui.
Planejamento e descrição do curso: planejamento, slides
Algumas referências:
Livros:
Artigos: Ortega, R. et al, Putting Energy Back in Control
Teses: Cardoso-Ribeiro, F. L., Port-Hamiltonian modeling and control of a fluid-structure system: Application to sloshing phenomena in a moving container coupled to a flexible structure
Planejamento e descrição do curso: planejamento, slides
1) Sistemas de comando de voo: slides
2) Equações do movimento logitudinal: slides
3) Linearização: slides
4) Estabilidade estática longitudinal: slides
5) Sistemas de aumento de estabilidade slides
6) Equações do movimento completo slides
7) Linearização das equações do movimento completo slides
Atividades práticas: modelos de avião em MATLAB, modelo atmosférico
1) Simulação do movimento longitudinal: slides
2) Linearização e simulação no Simulink: slides
3) Projeto de sistema de aumento de estabilidade: slides
Lista de exercícios e roteiro do relatório final
Ver moodle do curso!
Planejamento e descrição do curso: planejamento, slides
1) breve histórico e motivações para o estudo da mecânica orbital slides
2) revisão das Leis da mecânica (Bate: 1.1)
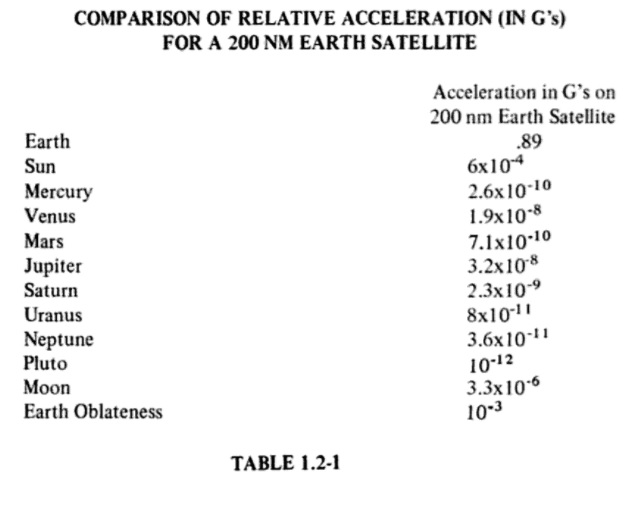
3) O problema de N-corpos (Bate: 1.2, ver tabela de parâmetro gravitacional)
4) O problema de 2-corpos (Bate: 1.3), propriedades conservadas (Bate: 1.4), equação da trajetória (1.5), energia e momento angular e propriedades geométricas (1.6), órbitas cônicas (1.7,1.8, 1.9, 1.10), e unidades canônicas (1.11)
5) Sistemas de coordenadas e elementos orbitais (2.2 e 2.3 e slides)
Descrição das atividades do primeiro bimestre: roteiro, slides
Laboratório de familiarização com o controle do motor DC: slides,
Códigos: código arduino, códigos MATLAB.
Desempenho em subida: exercício 1
Desempenho em curva: exercício 2
Desempenho integral
Decolagem slides
Manobras e digrama V-n slides
{kind=link}